
Исследователи из ETH Zurich разработали искусственные мышцы для движения роботов. Их можно использовать везде, где роботам необходимо быть мягкими, а не жесткими, или там, где им требуется большая чувствительность при взаимодействии с окружающей средой.
Мягкие роботы совершенно по-другому взаимодействуют с окружающей средой: они могут смягчать удары, как человеческие конечности, или аккуратно хватать предмет. Они также имеют преимущество в энергопотреблении. Обычный робот требует большого количества энергии, а мягкие системы также могут хорошо хранить энергию.
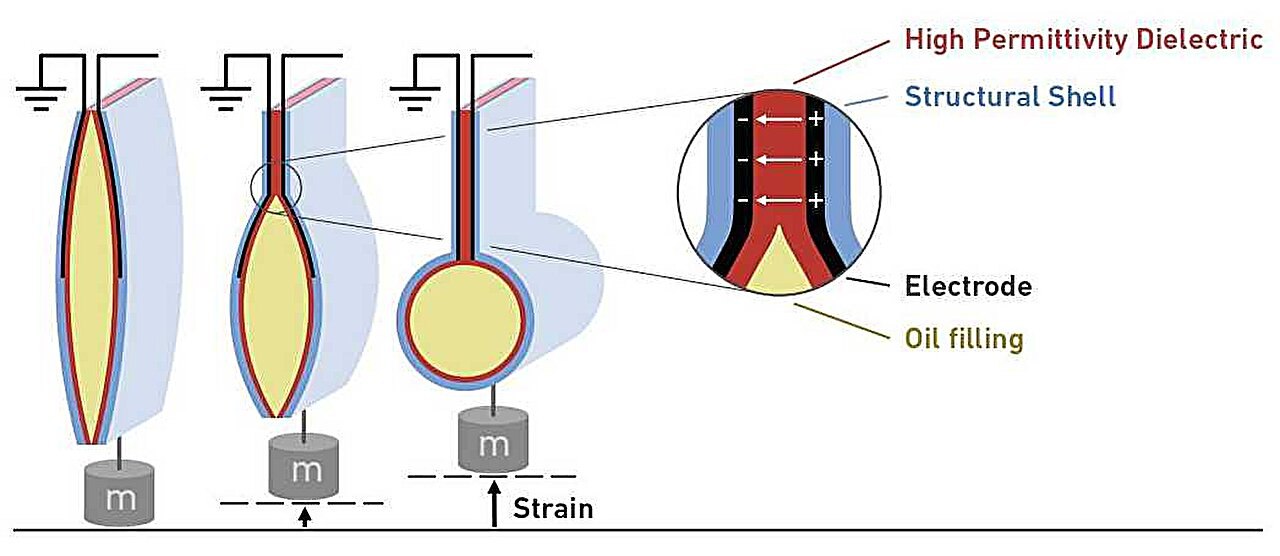
Функционирование искусственных мышц основано на биологии, они сокращаются в ответ на электрический импульс. Однако искусственные мышцы состоят не из клеток и волокон, а из мешочка, наполненного жидкостью (обычно маслом), оболочка которого частично покрыта электродами. Электроды, получая электрическое напряжение, сближаются и выталкивают жидкость в остальную часть пакета, который сгибается и, таким образом, способен поднимать вес. Одиночный мешочек аналогичен короткому пучку мышечных волокон; некоторые из них могут быть соединены, образуя целостный двигательный элемент, который также называют приводом или просто искусственным мускулом.
Новое решение было разработано профессором робототехники Робертом Кацшманном в ETH Zurich, вместе с другими коллегами. Искусственные мышцы однажды смогут использоваться в новых роботах, протезах или носимых устройствах — другими словами, в технологиях, которые носят на теле человека.