Ученые из Университета штата Аризона разработали новый тип искусственных мышц, работающих на сжатом воздухе. Согласно их публикации, эти приводы позволяют роботам поднимать груз, масса которого в 100 раз превышает их собственный вес, без использования традиционных громоздких электродвигателей и внешних источников питания.
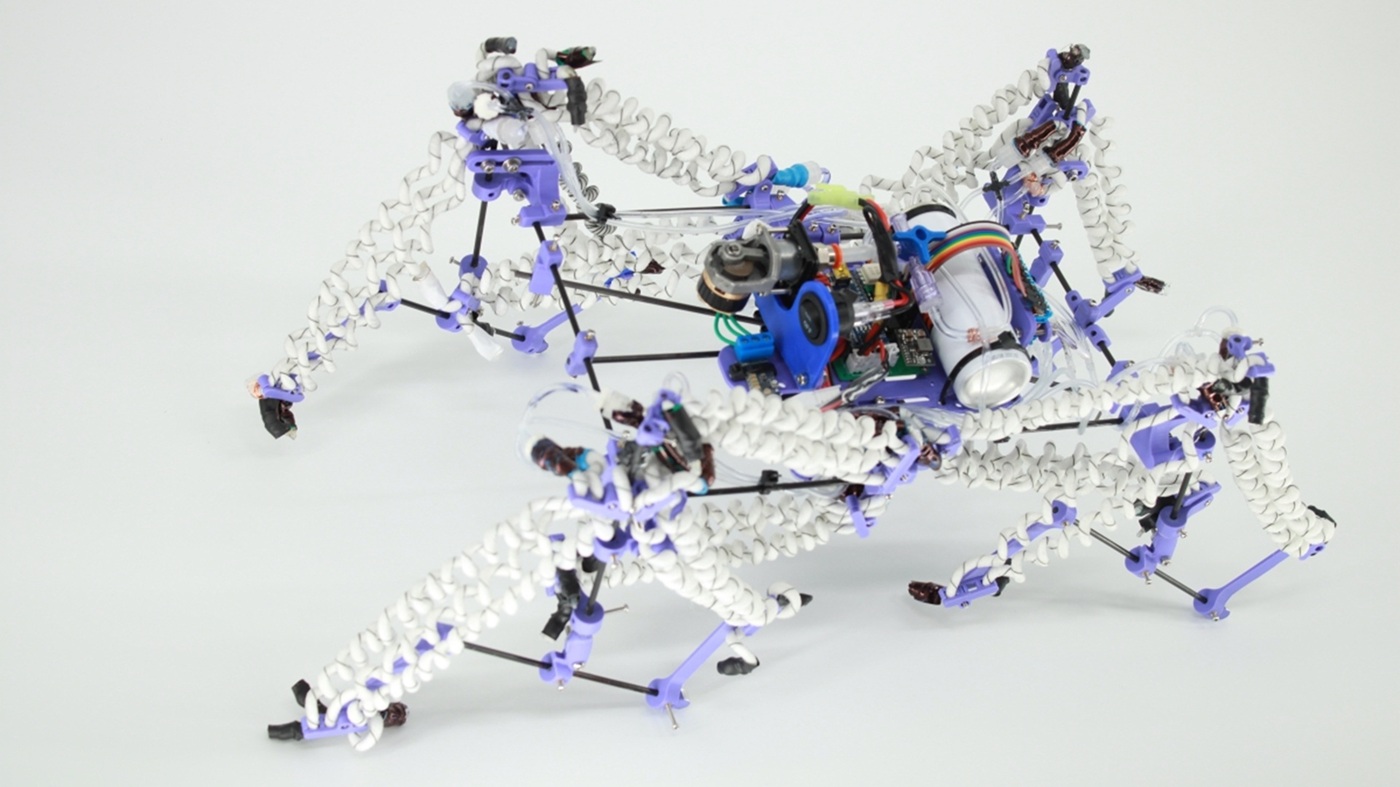
Разработка относится к классу биоинспирированных систем. Созданные полимерные актуаторы, названные спиральными анизотропно армированными (HARP), по форме напоминают маленькие полые трубки, скрученные наподобие пасты каватаппи. Для своего сокращения и расширения они требуют лишь небольшого количества сжатого воздуха.
Как отмечают авторы, такие искусственные мышцы обладают рядом преимуществ по сравнению с традиционными двигателями. Они гибкие, легкие, работают практически бесшумно и устойчивы к экстремальным условиям, включая кипящую воду и абразивные среды. Благодаря этим свойствам роботы на их основе могут преодолевать препятствия, которые замедляют обычные машины, и функционировать в местах стихийных бедствий, пробираясь через завалы в поисках выживших, а также использоваться в промышленной промывке и морских исследованиях.
Помимо грузоподъемности, ученые делают акцент на универсальности технологии. В лаборатории уже создана бионическая роботизированная рука, выполненная по образцу хобота слона, которая способна огибать препятствия и работать в тесном контакте с человеком. Также разработано носимое устройство для поддержки спины, снижающее нагрузку при подъеме тяжестей.
Новые мышцы могут найти применение в сельском хозяйстве, здравоохранении, при выполнении домашних задач и даже в будущих космических миссиях. Команда уже подала предварительную патентную заявку и получила академический грант от NVIDIA для дальнейшего развития проекта.
Читайте также: «Мягкий оптический датчик дает роботам более тонкое чувство осязания».