
У каждого из нас бывали ситуации, когда нам «не хватало рук» и было трудно справиться с чем-то самостоятельно. Даже если для сложной работы находился помощник, ему могло просто не хватить места, чтобы встать рядом, придержать или подать что-то. О подобных проблемах с количеством ног мы вспоминаем реже — в основном когда смотрим на игру наших футболистов. Инженеры Массачусетского технологического института со свойственной им прямотой решили проблему числа конечностей человека. Они разработали роботизированные руки и ноги, закрепляемые на плечах и пояснице соответственно. Человек с ними выглядит как Доктор Осьминог, но работает действительно более эффективно.

Интереснее всего выглядят роборуки: они способны удерживать детали, инструменты и самого человека, помогая ему при выполнении сложных манипуляций. Любые работы на высоте затрудняются тем, что большую часть времени приходится держаться хотя бы одной рукой. При этом не получается ни надёжной фиксации, ни ловких движений.

(фото: technabob.com).
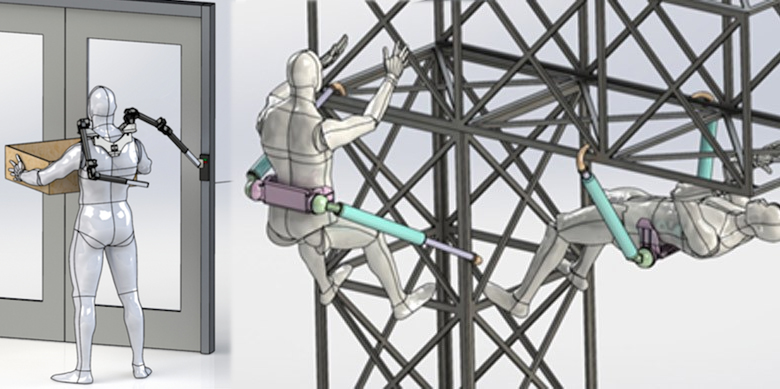
Роботизированные руки могут удерживать рабочего на строительной балке, пока он спокойно работает своими двумя руками. В отличие от страховочного фала, они обеспечивают две точки опоры и регулируют усилие. Более того, при использовании дополнительной страховки они самостоятельно перемещаются вместе с человеком, перехватывая поудобнее в подходящий момент. В этом случае блок с роборуками закрепляется на талии, что может быть также использовано как поддержка спины. Когда же работник спустится на землю, дополнительные руки помогут донести ящик или открыть дверь без посторонней помощи.
Установка подвесных потолков и другая подобная работа создаёт не меньше трудностей. Приходится одновременно держать лист закрепляемого материала, сам крепёж и шуруповёрт. Если лист длинный, то удерживать его надо с двух сторон, одновременно подравнивая: тогда одному не справиться вовсе.
Инженеры MIT устроили демонстрацию возможностей роботизированных рук на примере одного из этапов сборки пассажирского самолёта. В авиалайнере установлены десятки потолочных панелей, которые обычно закрепляет бригада из двух человек. Один подаёт панель и удерживает её всё время, а другой направляет и фиксирует. С роборуками, закреплёнными на плечах, эту манипуляцию можно выполнять в одиночку — и даже быстрее, чем вдвоём.
Не удивительно, что проект щедро финансирует авиастроительная компания Boeing. В условиях жёсткой конкуренции подобные инновации помогают обеспечить техническое преимущество.
Поскольку ключевая задача новинки — освободить собственные руки, традиционное управление при помощи джойстика или кнопок становится нерациональным. Разработчики рассматривают вариант управления голосовыми командами и через интерфейс «мозг — компьютер», но пока реализовали наиболее надёжный вариант — обучение движениям по аналогии.

Чтобы объяснить роборукам, где им надо находиться в определённый момент и что делать, другой человек сначала просто перемещает их в такт движениям оператора. На плечах, талии, собственных и роботизированных руках размещены датчики, которые отслеживают все перемещения и анализируют взаимное расположение. Записав последовательность как макрос, блок управления воспроизводит его, подстраиваясь под текущие изменения.
Особенность конструкции состоит в том, что блок с роборуками получился лёгким (чуть больше пяти килограммов) и достаточно прочным. Инженеры двух факультетов MIT потратили много времени на то, чтобы добиться компромисса между массой искусственных конечностей, их силой и функциональностью. Отдельным этапом был расчёт силовых линий, необходимый для того, чтобы распределить нагрузку равномерно вдоль позвоночника.

Федерико Париетти (Federico Parietti) из Лаборатории информационных систем и технологий возглавлял проект по созданию роботизированных рук, а его коллега Балдин Льоренс-Бонилья (Baldin Llorens-Bonilla) руководил группой машиностроительного факультета, занимавшейся разработкой робоног.
Разница между двумя типами дополнительных конечностей получилась весьма условной. Сейчас им можно доверить только довольно грубую работу по удержанию чего-либо и созданию адаптивной опоры, но для ранней версии это уже большой робошаг.