
Ученые частично смоделировали окончания Руффини, которые отвечают за ощущения растяжения, вибрации, тепла и давления.
Для передачи чувствительности ученые из Школы перспективных исследований имени Святой Анны, университета Ка-Фоскари и других институтов Италии использовали искусственную кожу и нейронную сеть, которую научили оценивать силу давления на искусственную кожу и определять точки, в которых робот прикасается к другим объектам.
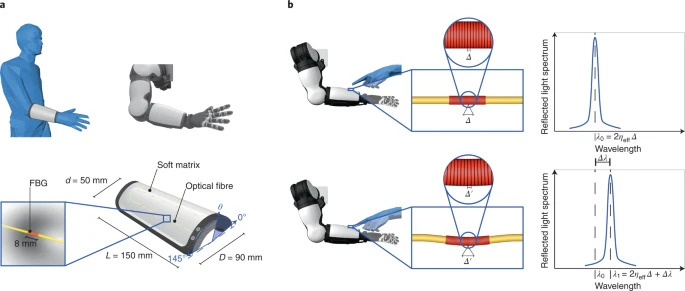
«Разработанная кожа состоит из мягкой полимерной матрицы, напоминающей по форме человеческое предплечье. В нее встроены преобразователи, которые частично имитируют функциональность биологических клеток», — объясняют исследователи.
В дальнейшем научный коллектив планирует расширить возможности кожи: попробовать различные формы и варианты архитектуры системы. Разработка может быть использована в создании различных гуманоидных роботов для улучшения их взаимодействия с человеком.