
Ученые представили необычную разработку — робота Argus, конструкция которого полностью пересматривает подход к проектированию подвижных машин. Вместо привычной биомиметики (имитации живых существ) инженеры сделали ставку на математическую симметрию.
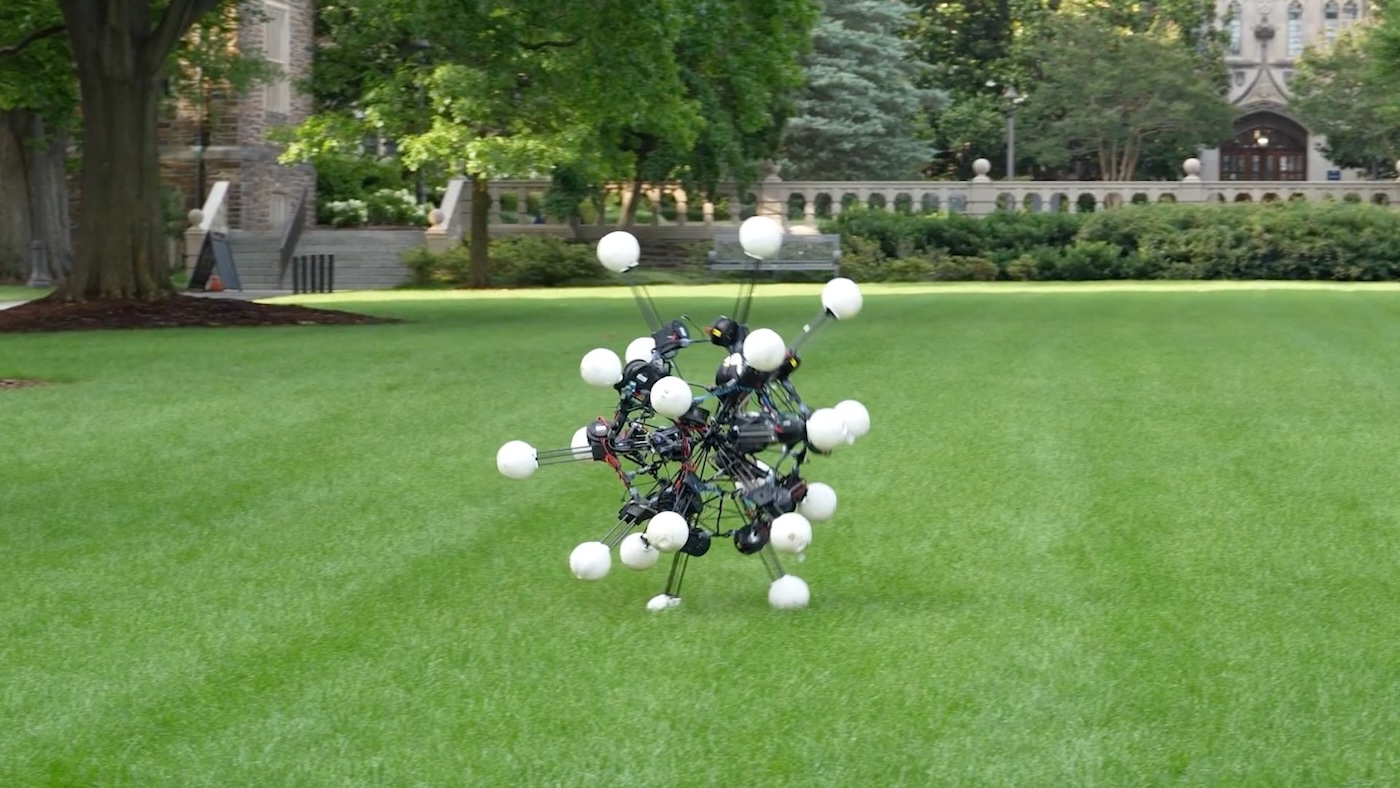
Argus имеет форму, напоминающую додекаэдр: от центрального ядра радиально отходят 20 модульных телескопических ног. Каждая из них оснащена собственной камерой глубины. У робота нет ни головы, ни хвоста, ни выраженного переда или зада — он одинаково функционален в любом направлении.
Основным понятием для этой разработки стала «динамическая изотропия» — математический критерий, оценивающий равномерность возможностей робота во всех направлениях. По шкале от 0 до 1 большинство современных систем (включая человекоподобных, четвероногих роботов и дроны) набирают менее 0,6 балла. Argus достиг показателя 0,91, что близко к теоретическому пределу.
Высокая изотропия дает несколько преимуществ одновременно: улучшенное отслеживание траектории, энергоэффективность, устойчивость к внешним воздействиям и живучесть при повреждениях.
Испытания подтвердили заявленные характеристики. Argus тестировали на песке, лесных тропах, траве, бетоне и мокрых покрытиях. Робот сохранял устойчивость и маневренность независимо от ориентации корпуса, преодолевал препятствия высотой до 13 сантиметров, а также быстро восстанавливался после толчков.
Даже с тремя поврежденными ногами Argus продолжал движение, демонстрируя высокую отказоустойчивость. Кроме того, робот смог нести груз массой 4,5 килограмма практически на полной скорости и взбираться по вертикальным стенам, попеременно используя разные группы конечностей.
Еще один показательный эксперимент: Argus отслеживал и толкал куб с гранью 90 см, заставляя его перекатываться. Это потребовало согласованной работы восприятия (камер на ногах) и движения, что было сначала отлажено в симуляции, а затем успешно перенесено в реальный мир.
Разработчики отмечают, что Argus — это не единичный прототип, а демонстрация целого класса машин. Предложенный ими принцип динамической изотропии позволяет проектировать, сравнивать и оценивать любые робототехнические платформы, исходя из равномерности их движений, а не из внешнего сходства с живыми организмами.